Stretch Teleop Kit
Created by: Hello Robot Inc
Overview



The Stretch Teleop Kit allows for improved remote teleoperation of Stretch. It adds two fish-eye USB cameras to Stretch. One is added to the robot's gripper for a better view while manipulating. The other is added to the robot's head and points downward, providing a better view while navigating.
Hardware
The Stretch Teleop Kit uses two Spinel UC20MPE_F185 USB cameras that provide a 185 degree FOV and 2MP resolution. These board cameras are mounted in 3D printed shells and attached to existing mount points of the Stretch.
Assembly
Hello Robot has provided the STL files, BOM, and assembly instructions necessary to build your own Stretch Teleop Kit. Alternatively, the kit is available for sale by Hello Robot.
*Note if building your own kit:: The Spinel cameras come with a custom USB to JST ZH cable. We recommend using a custom length cable however in order to improve the cable routing of your system. Please contact Hello Robot for details.
| 3D Printed Parts |
|---|
| 3DP-808_Teleop_Camera_Mount_Front.STL |
| 3DP-809_Head_Teleop_Mount_Back.STL |
| 3DP-810_Head_Teleop_Mount.STL |
| 3DP-811_Gripper_Teleop_Mount_Back.STL |
| 3DP-812_Gripper_Teleop_Mount_Bottom.STL |
Software
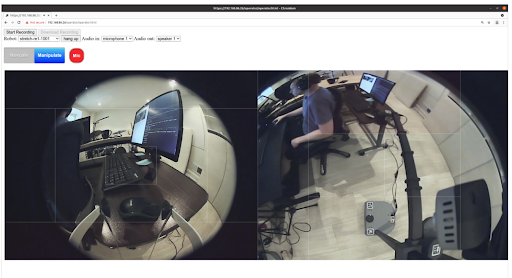
Teleoperation Interface
The Stretch Teleop Kit includes the open-source teleoperation interface (beta) that utilizes these cameras as shown below.
ROS Support
URDF
The Stretch RE1 URDF can be augmented with these two cameras as well. The URDF information is found here.
To add the Teleop Kit to your URDF:
cd ~/catkin_ws/src/stretch_ros/
git pull
cd ~/repos
git clone https://github.com/hello-robot/stretch_tool_share
cd ~/repos/stretch_tool_share/tool_share/stretch_teleop_kit/stretch_description
cp urdf/stretch_teleop_kit.xacro ~/catkin_ws/src/stretch_ros/stretch_description/urdf
cp urdf/stretch_description.xacro ~/catkin_ws/src/stretch_ros/stretch_description/urdf
cp meshes/*teleop*.STL ~/catkin_ws/src/stretch_ros/stretch_description/meshes
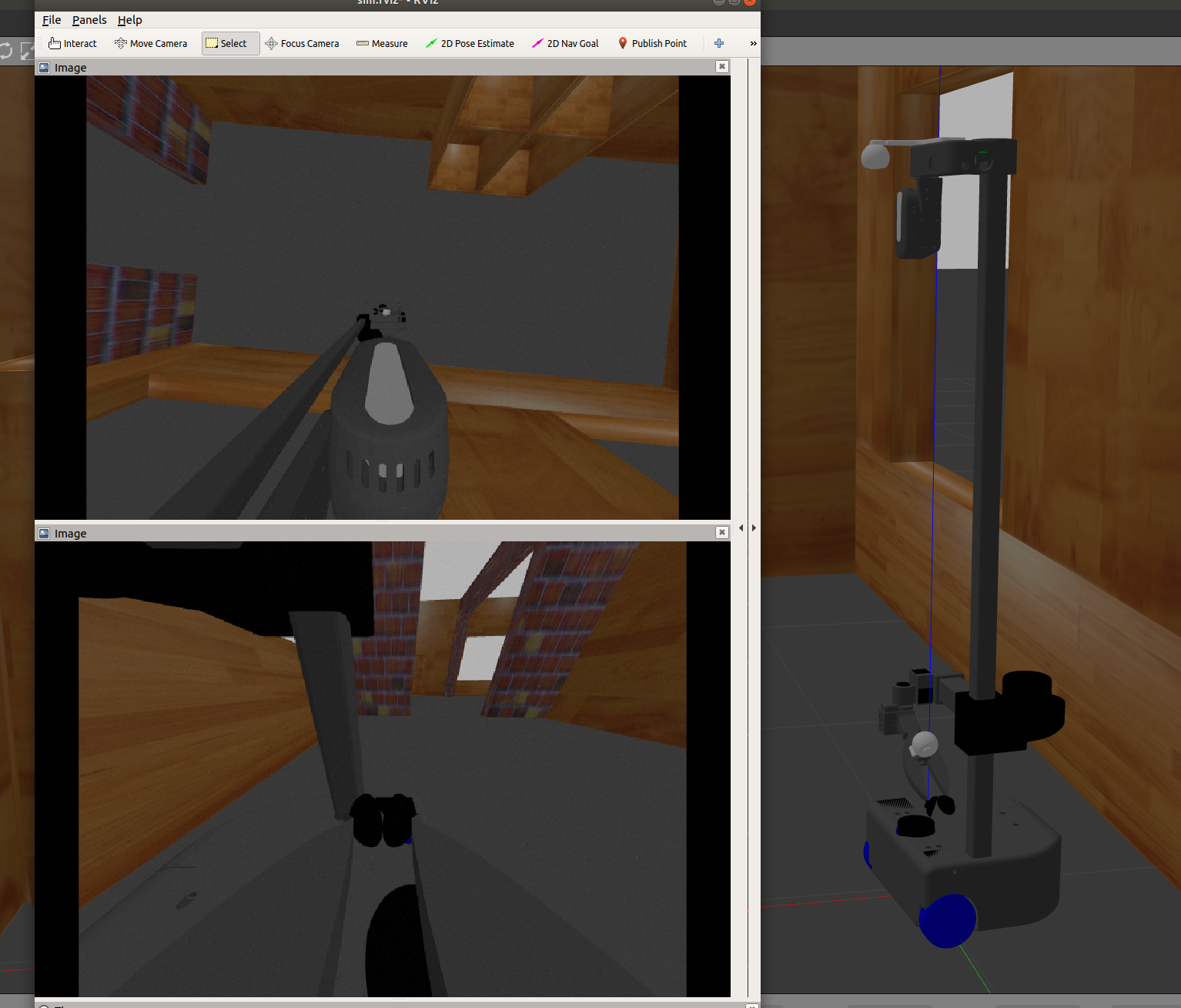
Gazebo
The Stretch RE1 robot with the Teleop Kit can also be simulated with Gazebo simulator. The information on Stretch robot's Gazebo implementation can be found here stretch_gazebo.
To add Teleop kit to the Stretch Gazebo implementation:
cd ~/catkin_ws/src/stretch_ros/
git pull
cd ~/repos
git clone https://github.com/hello-robot/stretch_tool_share
cd ~/repos/stretch_tool_share/tool_share/stretch_teleop_kit/stretch_description
cp urdf/stretch_teleop_kit.xacro ~/catkin_ws/src/stretch_ros/stretch_description/urdf
cp urdf/stretch_gazebo.urdf.xacro ~/catkin_ws/src/stretch_ros/stretch_gazebo/urdf/stretch_gazebo.urdf.xacro
cp meshes/*teleop*.STL ~/catkin_ws/src/stretch_ros/stretch_description/meshes
During Gazebo simulation the two Teleop camera's video streams would be published to the topics "teleop/gripper_camera" and "teleop/head_camera".