Wrist USB Camera

Wrist USB Board Camera
Create by: Hello Robot Inc
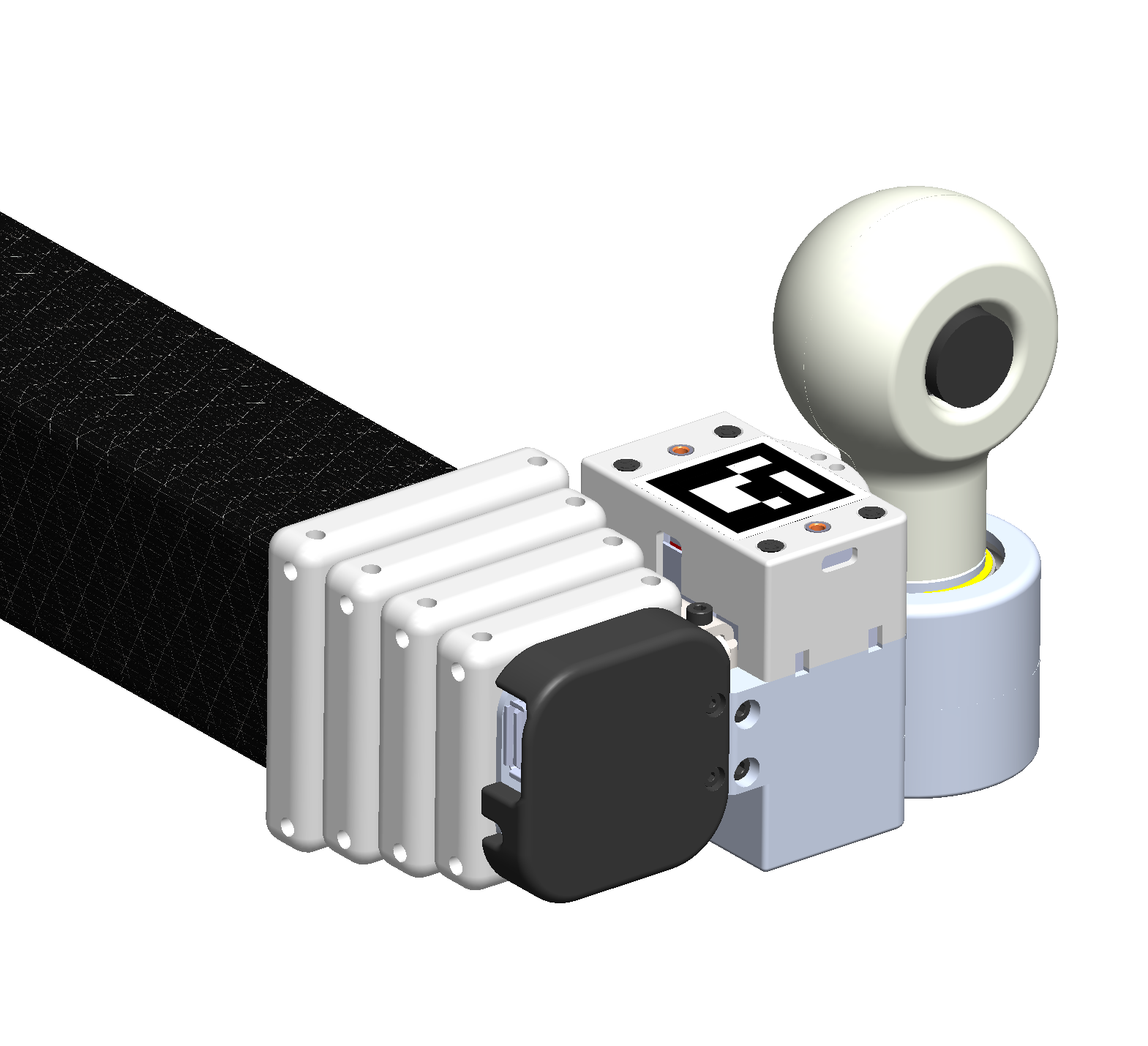
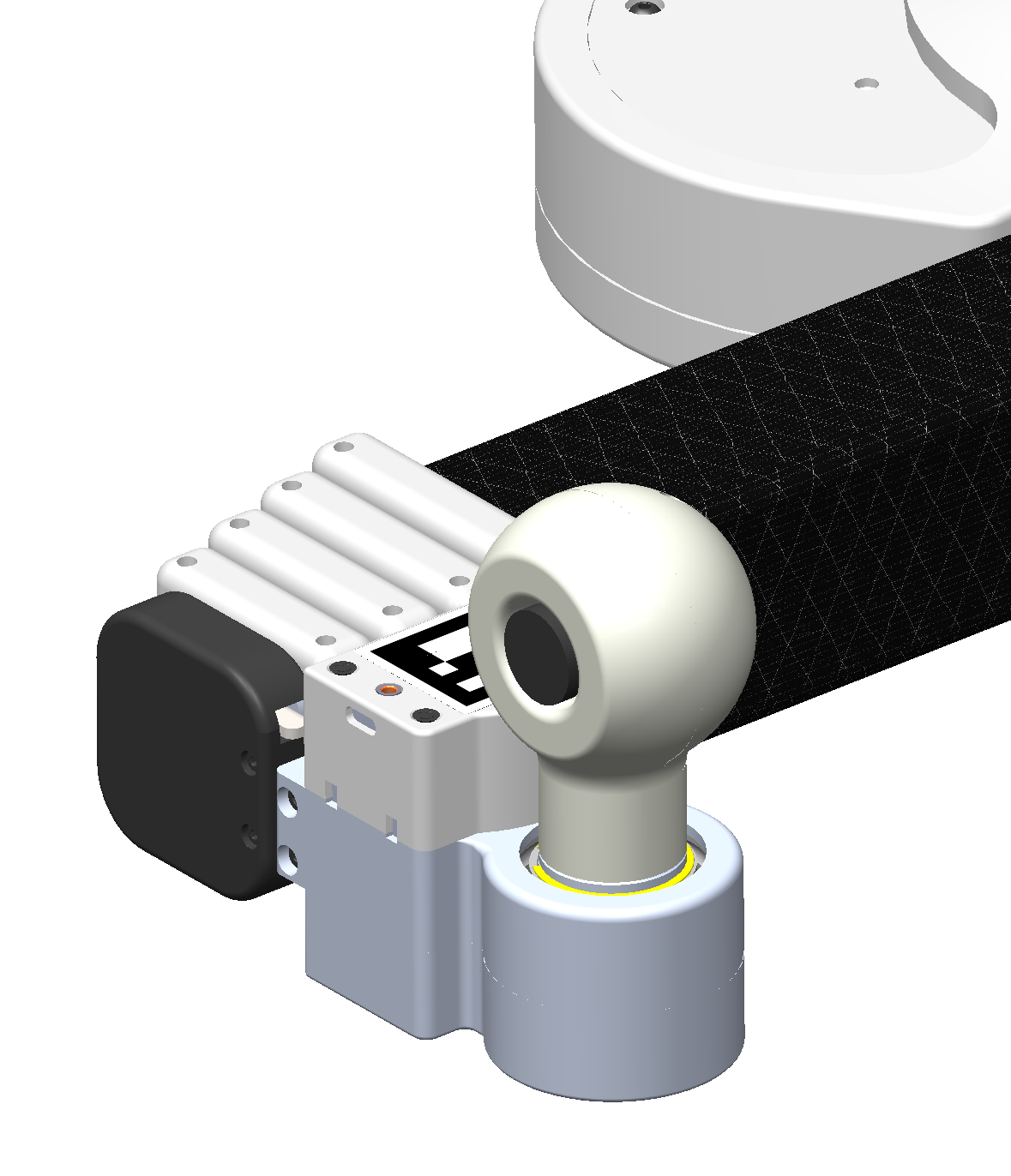
This design allows you to attach a USB board camera to the wrist yaw joint of Stretch. The wrist mounted camera can pan left-right, making it perfect for simple remote inspection tasks.
The camera can be integrated into your robot URDF by integrating its stretch_description as described in the Stretch ROS documentation.
Parts List
| Item | Qty | Vendor |
|---|---|---|
| M2x8mm SHCS | 8 | McMaster-Carr |
| M2x6mm Thread Forming Screw | 5 | McMaster-Carr |
| Board_Camera_Ball_Shell.STL | 1 | PLA 3D printer |
| Board_Camera_Ball_Cover.STL | 1 | PLA 3D printer |
| ELP 2MP USB Board Camera (Suggested) | 1 | Amazon / Spinel |
Assembly instructions
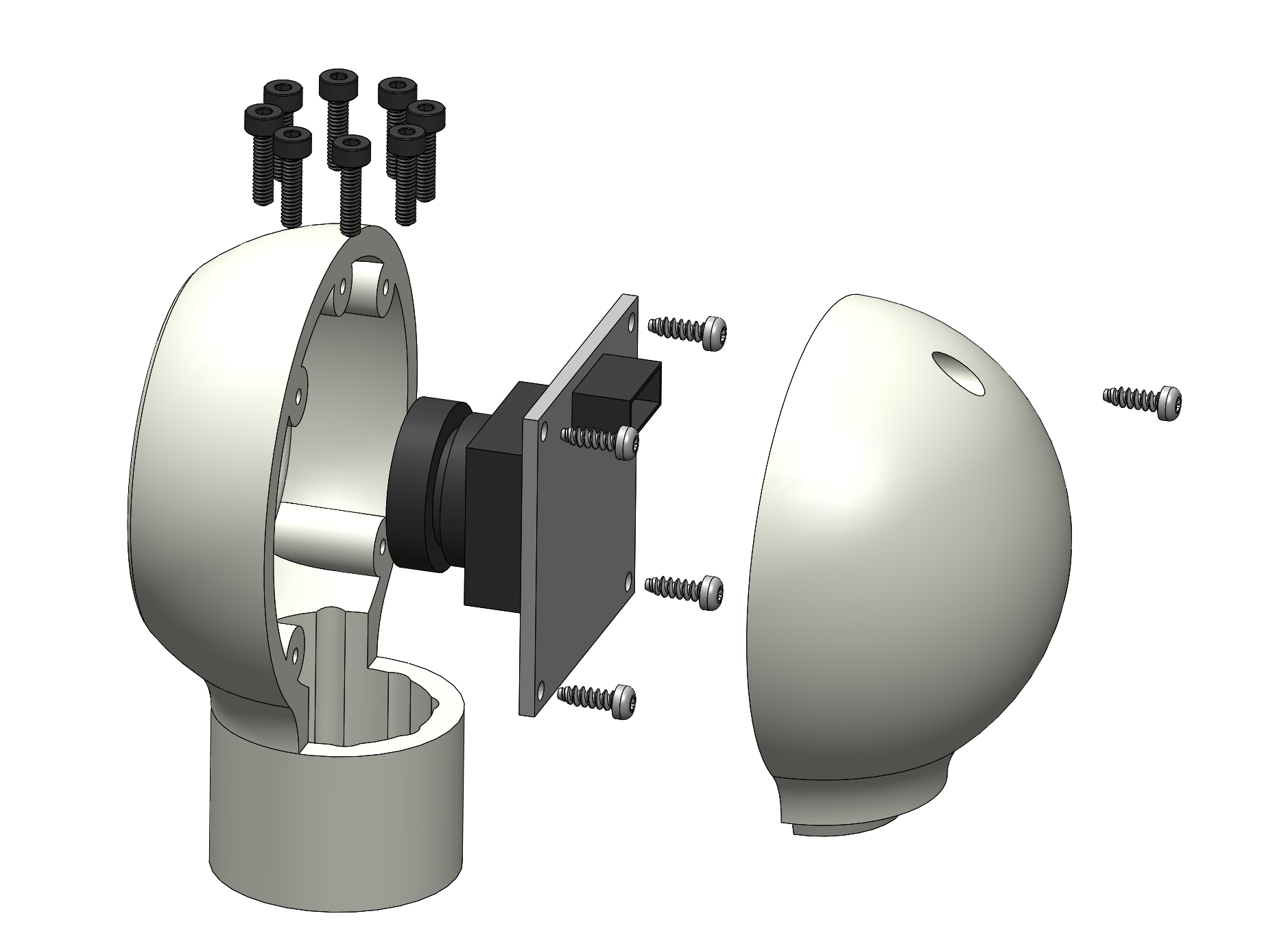
- Attach the Board_Camera_Ball_Shell to the wrist tool plate using the 8 M2 bolts
- Attach the camera to the Board_Camera_Ball_Shell using 4 self-threading screws
- Attach the USB cable and route it down and through the wrist yaw passage
- Attach the Boad_Camera_Ball_Cover using 1 self-threading screw
- Plug the USB cable into the USB-A port on the wrist
NOTE: The USB cable that comes with the camera uses a JST-PH connector. You may want to make your own cable with a custom length using a right-angle USB-A cable. This may require a JST-PH crimp tool.
NOTE: A variety of USB board cameras are available from ELP and Spinel, among others. The shells may need to be modified to accommodate variations in the mechanical packaging of these cameras.