 NOTE It is possible to brick the Wacc board by incorrectly configuring the hardware peripherals of the SAMD uC. Therefore, when integrating your custom hardware into the Wacc we strongly recommend emulating the Wacc board until the functionality is complete. The tutorial Wacc Emulation describes how to configure an Adafruit Metro M0 Express to behave as a stand-in for a Wacc board.
NOTE It is possible to brick the Wacc board by incorrectly configuring the hardware peripherals of the SAMD uC. Therefore, when integrating your custom hardware into the Wacc we strongly recommend emulating the Wacc board until the functionality is complete. The tutorial Wacc Emulation describes how to configure an Adafruit Metro M0 Express to behave as a stand-in for a Wacc board.
NOTE: These tutorials may require the latest version of Stretch Body. If necessary, please update your install.
Integrating an SPI Device
This tutorial illustrates the integration of a SPI device on to the Wrist Expansion header. It extends the Data Transfer tutorial. We recommend doing this tutorial prior to doing this one.
Calculator via SPI
In this tutorial we will run the calculator from the Data Transfer tutorial on an Adafruit Metro M0 Express (Arduino Zero) that is running as an SPI slave. It will take a calculator Command from the Wacc and return the result in Status message.
Flash Firmware
First, program the Metro with the provided sketch, zero_wacc_spi. Be sure to:
- Select the board's port from the IDE under Tools/Port
- Select the board 'Adafruit M0 Express' from the IDE under Tools/Board
Next, program the Wacc with the provided sketch, hello_wacc_spi. Be sure to:
- Select the board's port from the IDE under Tools/Port
- Select the board 'Hello Wacc' from the IDE under Tools/Board
Code Walk-through
The code is straightforward and is a natural extension of the code described in the Data Transfer tutorial. A few sections to highlight in the hello_wacc_spi sketch are:
First, in the sketch setup() we configure the slave select pin to be an output
pinMode(HEADER_SPI_SS,OUTPUT);
Next in setupWacc() we add code to configure the SPI
SPISettings settingsA(100000, MSBFIRST, SPI_MODE1);
SPI.begin();
SPI.beginTransaction(settingsA);
In Wacc.cpp we add the SPI code:
#include <SPI.h>
uint8_t spi_out[9]; //SPI data out
uint8_t spi_in[9]; //SPI data in
uint8_t ds_spi_cnt=0; //Down sample counter
float FS_SPI = 10; //Rate to run transactions (Hz)
void spiTransaction()
{
digitalWrite(HEADER_SPI_SS, LOW);
SPI.transfer('X'); //Mark start of transaction
memcpy(spi_out, (uint8_t *) (&cmd.calc), sizeof(Calc_Command));
for (uint8_t idx = 0; idx < 9; idx++)
spi_in[idx] = SPI.transfer(spi_out[idx]);
digitalWrite(HEADER_SPI_SS, HIGH);
memcpy((uint8_t *) (&stat.calc),spi_in+1, sizeof(Calc_Status));
}
Here, the 9 bytes of the Calc_Command are transferred out and the 4 bytes of the Calc_Status are received.
Note: This simple communication protocol is not robust, using an 'X' to demarcate the start of a transaction
Finally, we call the spiTransaction() function at a rate of FS_SPI by adding to stepWaccController():
if (ds_spi_cnt++ >= (FS_CTRL / FS_SPI))
{
ds_spi_cnt = 0;
spiTransaction();
}
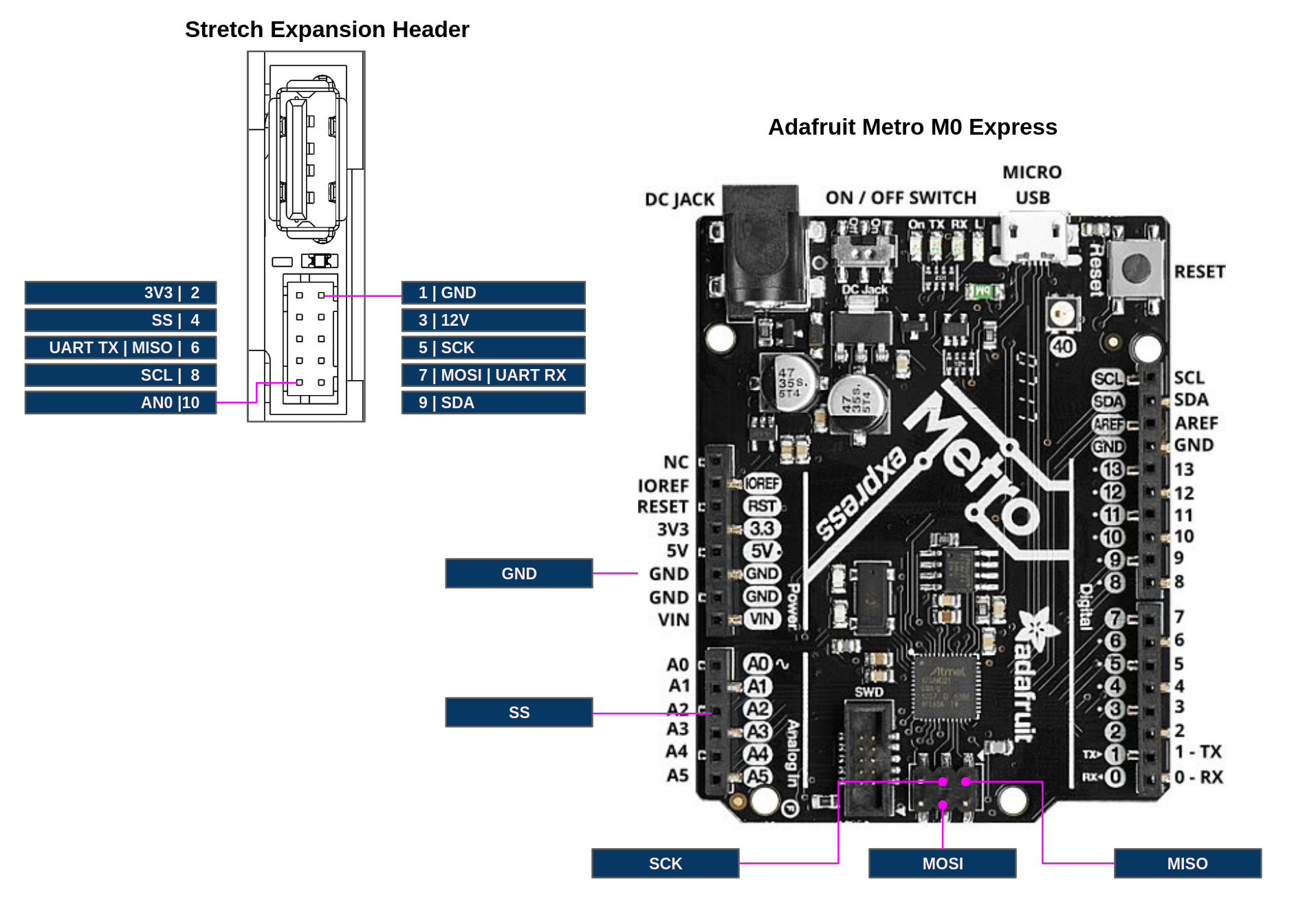
Wire Up the Boards
Next, wire the Metro to the Expansion Header as:
| Stretch Expansion Header | Uno |
|---|---|
| SS | SS |
| MISO | MISO |
| MOSI | MOSI |
| SCK | SCK |
| GND | GND |
Note: Other Arduino boards can be used. However 5V Arduinos boards will need their SPI lines level shifted to 3V3.
Test the Calculator
Now, test the setup using the provided tool, stretch_wacc_calc_jog.py. As shown below, The Arduino Uno performs the calculation of 12*13 and the result is report back to Stretch Body.
hello-robot@stretch-re1-100x:~$ cd repos/stretch_firmware/tutorial/python/
hello-robot@stretch-re1-100x:~/repos/stretch_firmware/tutorial/python$ ./stretch_wacc_calc_jog.py
------ MENU -------
m: menu
r: reset board
a: set D2 on
b: set D2 off
c: set D3 on
d: set D3 off
X: do calculation
-------------------
X
---Calculate Op(Var1,Var2) ---
Op=0: Add
Op=1: Mult
Op=2: Div
Enter Op
1
Enter Var1
12
Enter Var2
13
------ MENU -------
m: menu
r: reset board
a: set D2 on
b: set D2 off
c: set D3 on
d: set D3 off
X: do calculation
-------------------
------------------------------
Ax (m/s^2) 0.0488623343408
Ay (m/s^2) 0.155020624399
Az (m/s^2) -10.0049753189
A0 349
D0 (In) 0
D1 (In) 1
D2 (Out) 70
D3 (Out) 0
Single Tap Count 26
State 0
Debug 0
Timestamp 1591588745.27
Board version: Wacc.Guthrie.V1
Firmware version: Wacc.v0.0.1pMySPI
Calc: 156.0
------ MENU -------
m: menu
r: reset board
a: set D2 on
b: set D2 off
c: set D3 on
d: set D3 off
X: do calculation
-------------------