Internal State of Stretch
Getting the State of the Robot
Note
ROS 2 tutorials are still under active development.
Begin by starting up the stretch driver launch file by typing the following in a terminal.
ros2 launch stretch_core stretch_driver.launch.py
Then utilize the ROS command-line tool, ros2 topic, to display Stretch's internal state information. For instance, to view the current state of the robot's joints, simply type the following in a terminal.
ros2 topic echo /stretch/joint_states
Your terminal will then output the information associated with the /stretch/joint_states topic. Your header, position, velocity, and effort information may vary from what is printed below.
header:
seq: 70999
stamp:
secs: 1420
nsecs: 2000000
frame_id: ''
name: [joint_arm_l0, joint_arm_l1, joint_arm_l2, joint_arm_l3, joint_gripper_finger_left,
joint_gripper_finger_right, joint_head_pan, joint_head_tilt, joint_left_wheel, joint_lift,
joint_right_wheel, joint_wrist_yaw]
position: [-1.6137320244357253e-08, -2.9392484829061376e-07, -2.8036125938539207e-07, -2.056847528567165e-07, -2.0518734302754638e-06, -5.98271107676851e-06, 2.9291786329821434e-07, 1.3802900147297237e-06, 0.08154086954434359, 1.4361499260374905e-07, 0.4139061738340768, 9.32603306580404e-07]
velocity: [0.00015598730463972836, -0.00029395074514369584, -0.0002803845454217379, 1.322424459109634e-05, -0.00035084643762840415, 0.0012164337445918797, 0.0002138814988808099, 0.00010419792027496809, 4.0575263146426684e-05, 0.00022487596895736357, -0.0007751929074042957, 0.0002451588607332439]
effort: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
---
Additionally, if you type ros2 topic list in the terminal, you will see the list of active topics being published.
A powerful tool to visualize the ROS communication is through the rqt_graph package. You can see a graph of topics being communicated between nodes by typing the following.
ros2 run rqt_graph rqt_graph
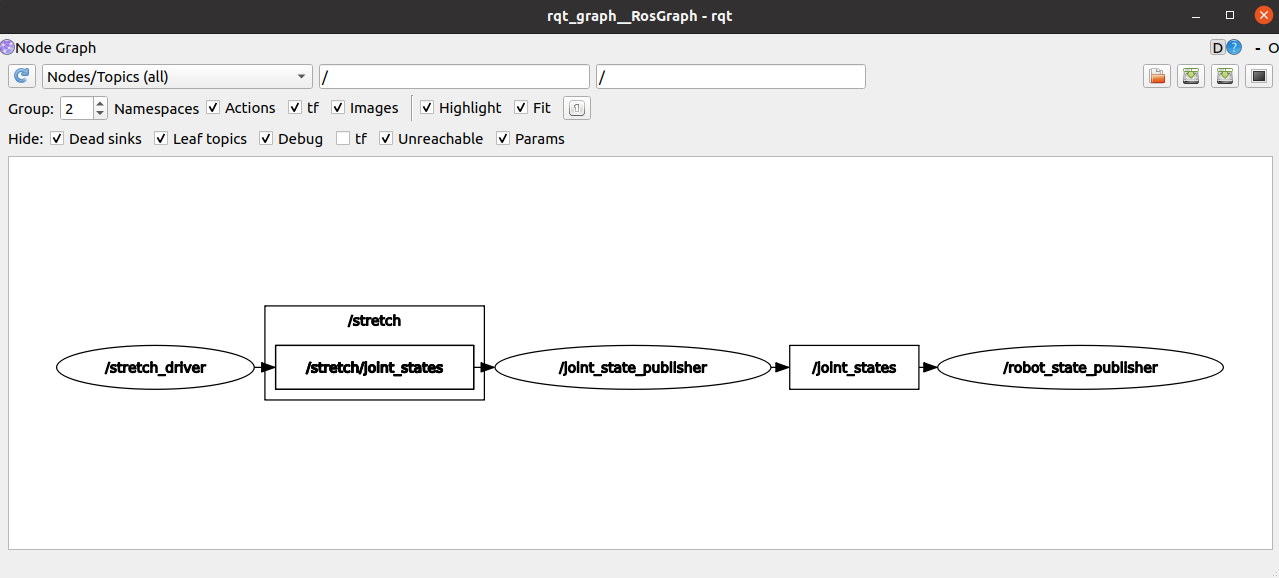
The graph allows a user to observe and affirm if topics are broadcasted to the correct nodes. This method can also be utilized to debug communication issues.