Teleoperating stretch
Teleoperating Stretch
Xbox Controller Teleoperating
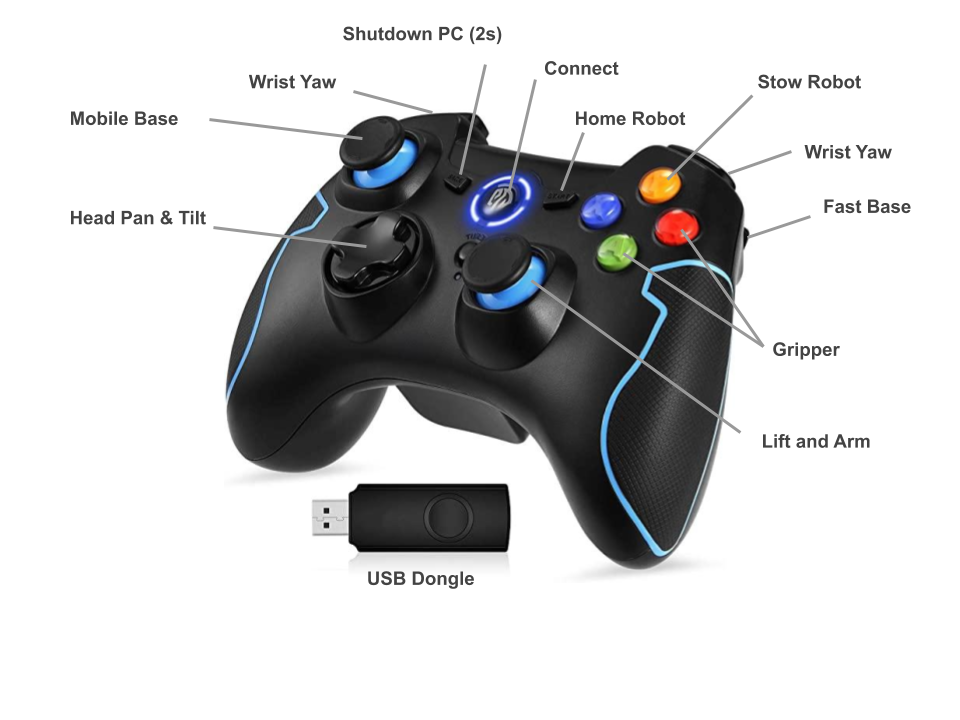
Stretch comes ready to run out of the box. The Xbox Teleoperation demo will let you quickly test out the robot capabilities by teleoperating it with an Xbox Controller.
Note: Make sure the USB Dongle is plugged into the the USB port of the base trunk.
To start the demo:
- Remove the 'trunk' cover and power on the robot Wait for about 45 seconds. You will hear the Ubuntu startup sound, followed by two beeps (indicating the demo is running).
- Hit the Connect button on the controller. The upper two LEDs of the ring will illuminate.
- Hit the Home Robot button. Stretch will go through its homing calibration routine.
- Note: make sure the space around the robot is clear before running the Home function
You're ready to go! A few things to try:
- Hit the Stow Robot button. The robot will assume the stow pose.
- Practice driving the robot around.
- Pull the Fast Base trigger while driving. When stowed, it will make Stretch drive faster
- Manually stop the arm or lift from moving to make it stop upon contact.
- Try picking up your cellphone from the floor
- Try grasping cup from a counter top
- Try delivering an object to a person
If you're done, hold down the Shutdown PC button for 2 seconds. This will cause the PC to turn off. You can then power down the robot.
Keyboard Teleoperating: Mobile Base
Begin by running the following command in your terminal:
# Terminal 1
roslaunch stretch_core stretch_driver.launch
To teleoperate a Stretch's mobile base with the keyboard, you first need to switch the mode to nagivation for the robot to receive Twist messages. This is done using a rosservice call in a new terminal. In the same terminal run the teleop_twist_keyboard node with the argument remapping the cmd_vel topic name to stretch/cmd_vel.
# Terminal 2
rosservice call /switch_to_navigation_mode
rosrun teleop_twist_keyboard teleop_twist_keyboard.py cmd_vel:=stretch/cmd_vel
Below are the keyboard commands that allow a user to move Stretch's base.
Reading from the keyboard and Publishing to Twist!
---------------------------
Moving around:
u i o
j k l
m , .
For Holonomic mode (strafing), hold down the shift key:
---------------------------
U I O
J K L
M < >
t : up (+z)
b : down (-z)
anything else : stop
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
CTRL-C to quit
currently: speed 0.5 turn 1.0
Create a node for Mobile Base Teleoperating
To move Stretch's mobile base using a python script, please look at example 1 for reference.
Keyboard Teleoperating: Full Body
For full body teleoperation with the keyboard, you first need to run the stretch_driver.launch in a terminal.
# Terminal 1
roslaunch stretch_core stretch_driver.launch
# Terminal 2
rosrun stretch_core keyboard_teleop
Below are the keyboard commands that allow a user to control all of Stretch's joints.
---------- KEYBOARD TELEOP MENU -----------
i HEAD UP
j HEAD LEFT l HEAD RIGHT
, HEAD DOWN
7 BASE ROTATE LEFT 9 BASE ROTATE RIGHT
home page-up
8 LIFT UP
up-arrow
4 BASE FORWARD 6 BASE BACK
left-arrow right-arrow
2 LIFT DOWN
down-arrow
w ARM OUT
a WRIST FORWARD d WRIST BACK
x ARM IN
5 GRIPPER CLOSE
0 GRIPPER OPEN
step size: b BIG, m MEDIUM, s SMALL
q QUIT
-------------------------------------------
Teleoperating in Gazebo
Keyboard Teleoperating: Mobile Base
For keyboard teleoperation of the Stretch's mobile base, first startup Stretch in simulation. Then run the following command in a new terminal.
# Terminal 1
roslaunch stretch_gazebo gazebo.launch
In a new terminal, type the following
# Terminal 2
roslaunch stretch_core teleop_twist.launch twist_topic:=/stretch_diff_drive_controller/cmd_vel linear:=1.0 angular:=2.0 teleop_type:=keyboard # or use teleop_type:=joystick if you have a controller
Xbox Controller Teleoperating
An alternative for robot base teleoperation is to use an Xbox controller. Stop the keyboard teleoperation node by typing Ctrl + c in the terminal where the command was executed. Then connect the Xbox controller device to your local machine and run the following command.
# Terminal 2
roslaunch stretch_core teleop_twist.launch twist_topic:=/stretch_diff_drive_controller/cmd_vel linear:=1.0 angular:=2.0 teleop_type:=joystick