Example 2
Example 2
The aim of this example is to provide instruction on how to filter scan messages.
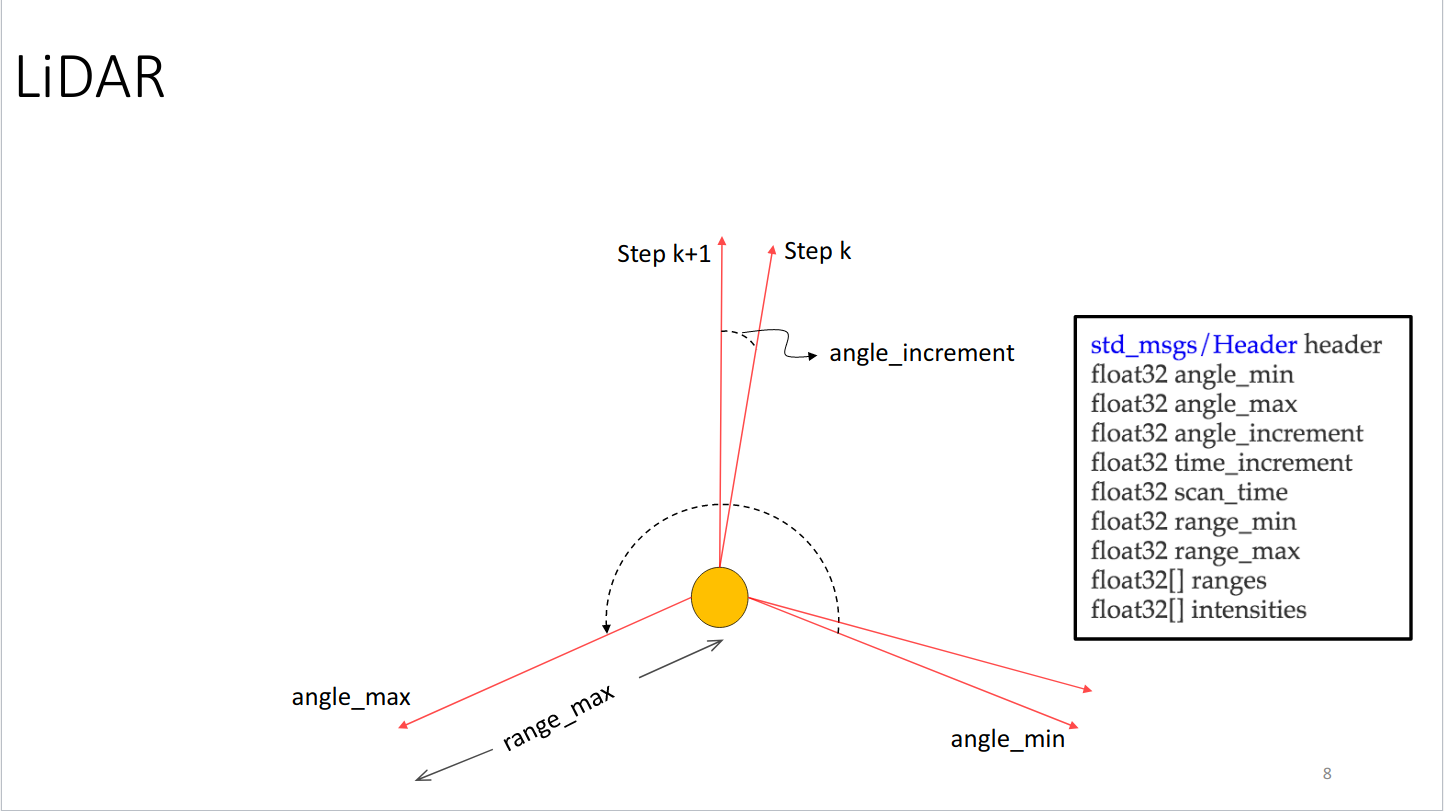
For robots with laser scanners, ROS provides a special Message type in the sensor_msgs package called LaserScan to hold information about a given scan. Let's take a look at the message specification itself:
# Laser scans angles are measured counter clockwise, with Stretch's LiDAR having
# both angle_min and angle_max facing forward (very closely along the x-axis)
Header header
float32 angle_min # start angle of the scan [rad]
float32 angle_max # end angle of the scan [rad]
float32 angle_increment # angular distance between measurements [rad]
float32 time_increment # time between measurements [seconds]
float32 scan_time # time between scans [seconds]
float32 range_min # minimum range value [m]
float32 range_max # maximum range value [m]
float32[] ranges # range data [m] (Note: values < range_min or > range_max should be discarded)
float32[] intensities # intensity data [device-specific units]
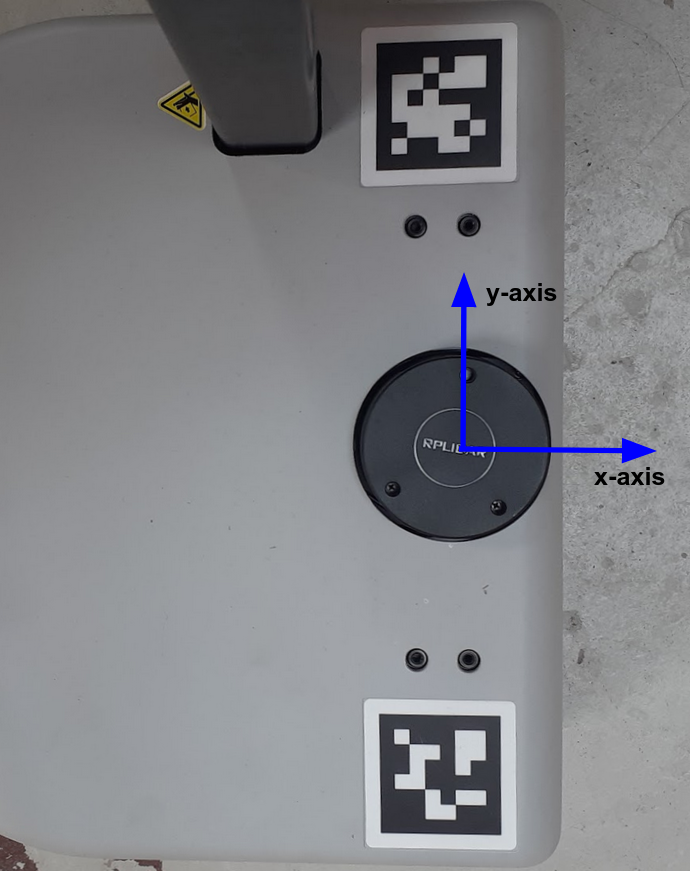
For a Stretch robot the start angle of the scan, angle_min, and
end angle, angle_max, are closely located along the x-axis of Stretch's frame. angle_min and angle_max are set at -3.1416 and 3.1416, respectively. This is illustrated by the images below.
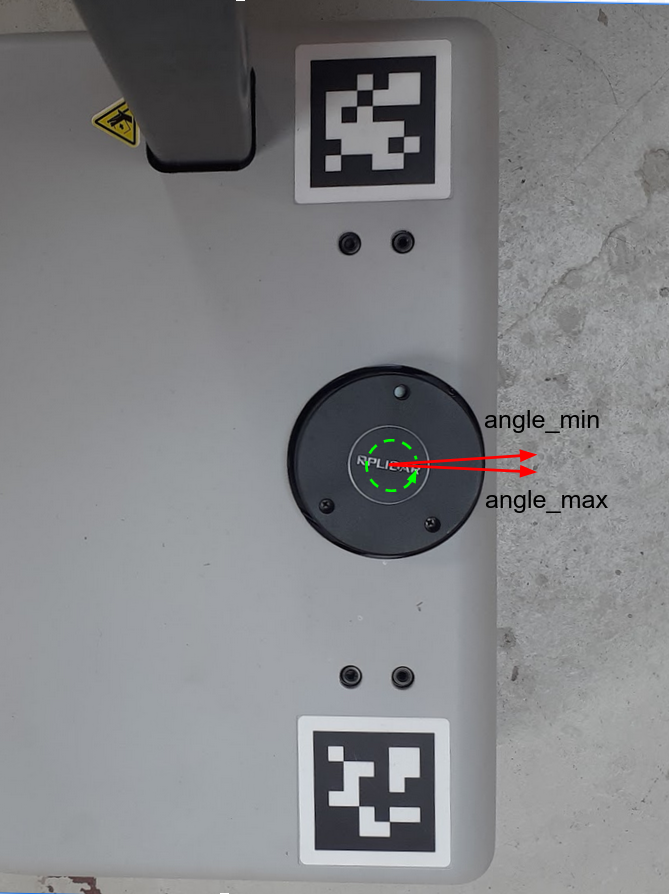
Knowing the orientation of the LiDAR allows us to filter the scan values for a desired range. In this case, we are only considering the scan ranges in front of the stretch robot.
First, open a terminal and run the stretch driver launch file.
# Terminal 1
roslaunch stretch_core stretch_driver.launch
Then in a new terminal run the rplidar.launch file from stretch_core.
# Terminal 2
roslaunch stretch_core rplidar.launch
To filter the lidar scans for ranges that are directly in front of Stretch (width of 1 meter) run the scan_filter.py node by typing the following in a new terminal.
# Terminal 3
cd catkin_ws/src/stretch_tutorials/src/
python scan_filter.py
Then run the following command to bring up a simple RViz configuration of the Stretch robot.
# Terminal 4
rosrun rviz rviz -d `rospack find stretch_core`/rviz/stretch_simple_test.rviz
The Code
#!/usr/bin/env python
import rospy
from numpy import linspace, inf
from math import sin
from sensor_msgs.msg import LaserScan
class ScanFilter:
"""
A class that implements a LaserScan filter that removes all of the points
that are not in front of the robot.
"""
def __init__(self):
self.width = 1.0
self.extent = self.width / 2.0
self.sub = rospy.Subscriber('/scan', LaserScan, self.callback)
self.pub = rospy.Publisher('filtered_scan', LaserScan, queue_size=10)
rospy.loginfo("Publishing the filtered_scan topic. Use RViz to visualize.")
def callback(self,msg):
"""
Callback function to deal with incoming LaserScan messages.
:param self: The self reference.
:param msg: The subscribed LaserScan message.
:publishes msg: updated LaserScan message.
"""
angles = linspace(msg.angle_min, msg.angle_max, len(msg.ranges))
points = [r * sin(theta) if (theta < -2.5 or theta > 2.5) else inf for r,theta in zip(msg.ranges, angles)]
new_ranges = [r if abs(y) < self.extent else inf for r,y in zip(msg.ranges, points)]
msg.ranges = new_ranges
self.pub.publish(msg)
if __name__ == '__main__':
rospy.init_node('scan_filter')
ScanFilter()
rospy.spin()
The Code Explained
Now let's break the code down.
#!/usr/bin/env python
import rospy
from numpy import linspace, inf
from math import sin
from sensor_msgs.msg import LaserScan
rospy if you are writing a ROS Node. There are functions from numpy and math that are required within this code, thus why linspace, inf, and sin are imported. The sensor_msgs.msg import is so that we can subscribe and publish LaserScan messages.
self.width = 1
self.extent = self.width / 2.0
self.sub = rospy.Subscriber('/scan', LaserScan, self.callback)
LaserScan messages. When a message comes in, ROS is going to pass it to the function "callback" automatically.
self.pub = rospy.Publisher('filtered_scan', LaserScan, queue_size=10)
pub = rospy.Publisher("filtered_scan", LaserScan, queue_size=10) declares that your node is publishing to the filtered_scan topic using the message type LaserScan. This lets the master tell any nodes listening on filtered_scan that we are going to publish data on that topic.
angles = linspace(msg.angle_min, msg.angle_max, len(msg.ranges))
points = [r * sin(theta) if (theta < -2.5 or theta > 2.5) else inf for r,theta in zip(msg.ranges, angles)]
new_ranges = [r if abs(y) < self.extent else inf for r,y in zip(msg.ranges, points)]
msg.ranges = new_ranges
self.pub.publish(msg)
rospy.init_node('scan_filter')
ScanFilter()
rospy.init_node(NAME, ...), is very important as it tells rospy the name of your node -- until rospy has this information, it cannot start communicating with the ROS Master. NOTE: the name must be a base name, i.e. it cannot contain any slashes "/".
Instantiate the class with ScanFilter()
rospy.spin()