Rviz Markers
Example 4¶
Note
ROS 2 tutorials are still under active development.
Let's bring up Stretch in RViz by using the following command.
ros2 launch stretch_core stretch_driver.launch.py
ros2 run rviz2 rviz2 -d `ros2 pkg prefix stretch_calibration`/share/stretch_calibration/rviz/stretch_simple_test.rviz
In a new terminal run the following commands to create a marker.
ros2 run stretch_ros_tutorials marker
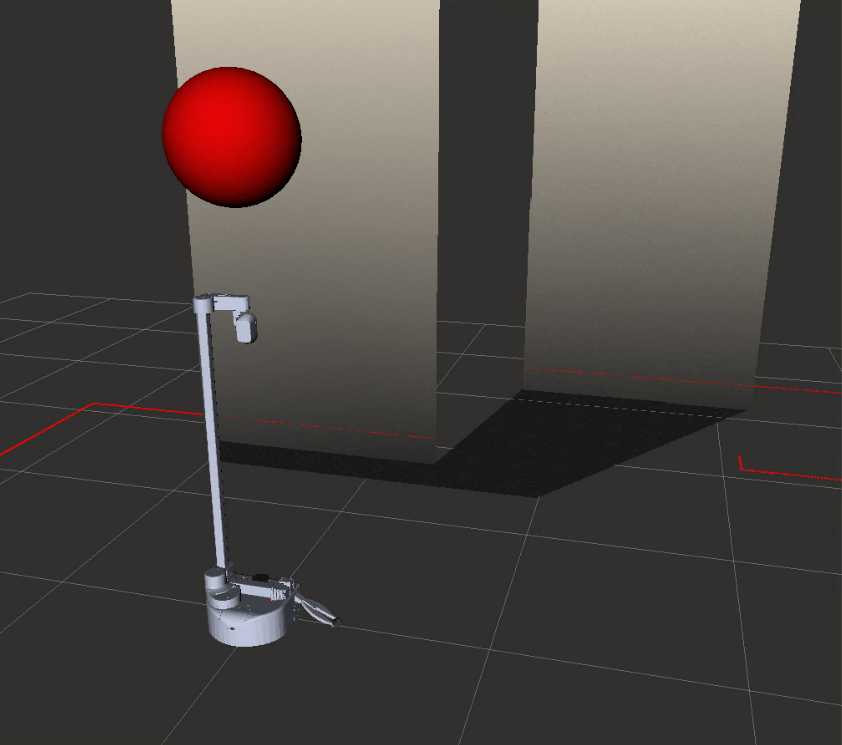
The gif below demonstrates how to add a new Marker display type, and change the topic name from visualization_marker to balloon. A red sphere Marker should appear above the Stretch robot.
The Code¶
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from visualization_msgs.msg import Marker
class Balloon(Node):
def __init__(self):
super().__init__('stretch_marker')
self.publisher_ = self.create_publisher(Marker, 'balloon', 10)
self.marker = Marker()
self.marker.header.frame_id = '/base_link'
self.marker.header.stamp = self.get_clock().now().to_msg()
self.marker.type = self.marker.SPHERE
self.marker.id = 0
self.marker.action = self.marker.ADD
self.marker.scale.x = 0.5
self.marker.scale.y = 0.5
self.marker.scale.z = 0.5
self.marker.color.r = 1.0
self.marker.color.g = 0.0
self.marker.color.b = 0.0
self.marker.color.a = 1.0
self.marker.pose.position.x = 0.0
self.marker.pose.position.y = 0.0
self.marker.pose.position.z = 2.0
self.get_logger().info("Publishing the balloon topic. Use RViz to visualize.")
def publish_marker(self):
self.publisher_.publish(self.marker)
def main(args=None):
rclpy.init(args=args)
balloon = Balloon()
while rclpy.ok():
balloon.publish_marker()
balloon.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
The Code Explained¶
Now let's break the code down.
#!/usr/bin/env python3
Every Python ROS Node will have this declaration at the top. The first line makes sure your script is executed as a Python script.
import rclpy
from rclpy.node import Node
from visualization_msgs.msg import Marker
You need to import rclpy if you are writing a ROS 2 Node. Import the Marker type from the visualization_msgs.msg package. This import is required to publish a Marker, which will be visualized in RViz.
self.publisher_ = self.create_publisher(Marker, 'balloon', 10)
This declares that your node is publishing to the /ballon topic using the message type Twist.
self.marker = Marker()
self.marker.header.frame_id = '/base_link'
self.marker.header.stamp = self.get_clock().now().to_msg()
self.marker.type = self.marker.SPHERE
Create a maker. Markers of all shapes share a common type. Set the frame ID and type. The frame ID is the frame in which the position of the marker is specified. The type is the shape of the marker. Further details on marker shapes can be found here: RViz Markers
self.marker.id = 0
Each marker has a unique ID number. If you have more than one marker that you want displayed at a given time, then each needs to have a unique ID number. If you publish a new marker with the same ID number of an existing marker, it will replace the existing marker with that ID number.
self.marker.action = self.marker.ADD
This line of code sets the action. You can add, delete, or modify markers.
self.marker.scale.x = 0.5
self.marker.scale.y = 0.5
self.marker.scale.z = 0.5
These are the size parameters for the marker. These will vary by marker type.
self.marker.color.r = 1.0
self.marker.color.g = 0.0
self.marker.color.b = 0.0
Color of the object, specified as r/g/b/a, with values in the range of [0, 1].
self.marker.color.a = 1.0
The alpha value is from 0 (invisible) to 1 (opaque). If you don't set this then it will automatically default to zero, making your marker invisible.
self.marker.pose.position.x = 0.0
self.marker.pose.position.y = 0.0
self.marker.pose.position.z = 2.0
Specify the pose of the marker. Since spheres are rotationally invariant, we're only going to specify the positional elements. As usual, these are in the coordinate frame named in frame_id. In this case, the position will always be directly 2 meters above the frame_id (base_link), and will move with it.
def publish_marker(self):
self.publisher_.publish(self.marker)
Publish the Marker data structure to be visualized in RViz.
def main(args=None):
rclpy.init(args=args)
balloon = Balloon()
The next line, rospy.init. In this case, your node will take on the name talker. NOTE: the name must be a base name, i.e. it cannot contain any slashes "/".
Setup Balloon class with balloon = Balloon()
while rclpy.ok():
balloon.publish_marker()
balloon.destroy_node()
rclpy.shutdown()
This loop is a fairly standard rclpy construct: checking the rclpy.ok() flag and then doing work. You have to run this check to see if your program should exit (e.g. if there is a Ctrl-C or otherwise).