Internal state of stretch
Getting the State of the Robot
Begin by starting up the stretch driver launch file.
# Terminal 1
roslaunch stretch_core stretch_driver.launch
Then utilize the ROS command-line tool, rostopic, to display Stretch's internal state information. For instance, to view the current state of the robot's joints, simply type the following in a terminal.
# Terminal 2
rostopic echo /joint_states -n1
-n1, at the end of the command defines the count of how many times you wish to publish the current topic information. Remove the flag if you prefer to continuously print the topic for debugging purposes.
Your terminal will output the information associated with the /joint_states topic. Your header, position, velocity, and effort information may vary from what is printed below.
header:
seq: 70999
stamp:
secs: 1420
nsecs: 2000000
frame_id: ''
name: [joint_arm_l0, joint_arm_l1, joint_arm_l2, joint_arm_l3, joint_gripper_finger_left,
joint_gripper_finger_right, joint_head_pan, joint_head_tilt, joint_left_wheel, joint_lift,
joint_right_wheel, joint_wrist_yaw]
position: [-1.6137320244357253e-08, -2.9392484829061376e-07, -2.8036125938539207e-07, -2.056847528567165e-07, -2.0518734302754638e-06, -5.98271107676851e-06, 2.9291786329821434e-07, 1.3802900147297237e-06, 0.08154086954434359, 1.4361499260374905e-07, 0.4139061738340768, 9.32603306580404e-07]
velocity: [0.00015598730463972836, -0.00029395074514369584, -0.0002803845454217379, 1.322424459109634e-05, -0.00035084643762840415, 0.0012164337445918797, 0.0002138814988808099, 0.00010419792027496809, 4.0575263146426684e-05, 0.00022487596895736357, -0.0007751929074042957, 0.0002451588607332439]
effort: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
---
Let's say you are interested in only seeing the header component of the /joint_states topic, you can output this within the rostopic command-line tool by typing the following command.
# Terminal 2
rostopic echo /joint_states/header -n1
seq: 97277
stamp:
secs: 1945
nsecs: 562000000
frame_id: ''
---
Additionally, if you were to type rostopic echo / in the terminal, then press your Tab key on your keyboard, you will see the list of published active topics.
A powerful tool to visualize the ROS communication is the ROS rqt_graph package. By typing the following, you can see a graph of topics being communicated between nodes.
# Terminal 3
rqt_graph
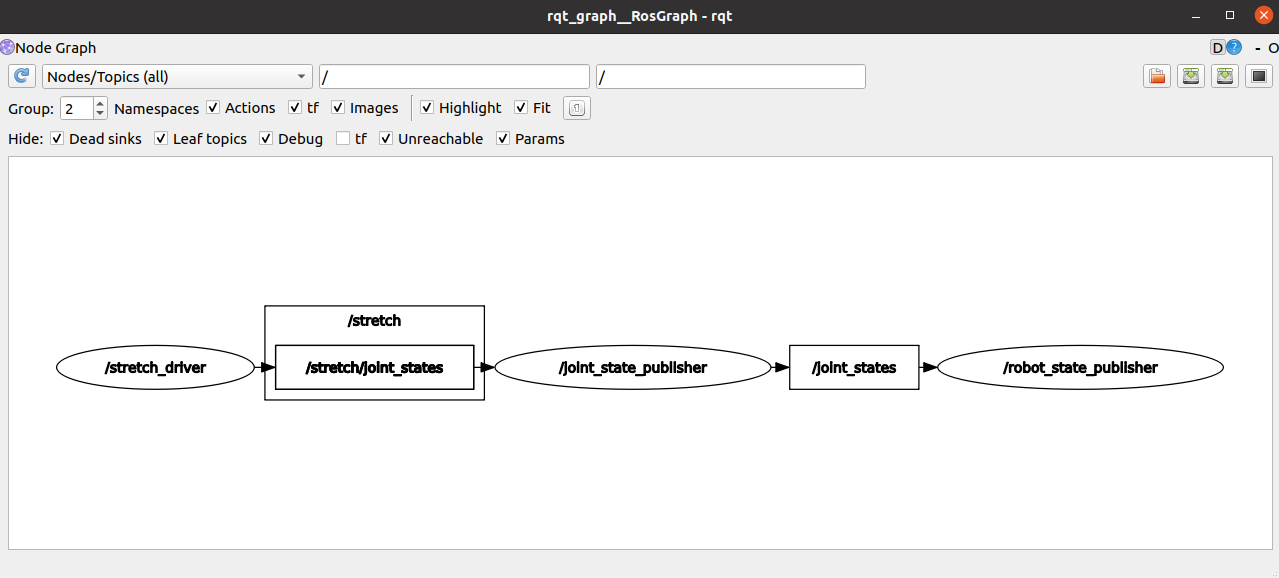
The graph allows a user to observe and affirm if topics are broadcasted to the correct nodes. This method can also be utilized to debug communication issues.